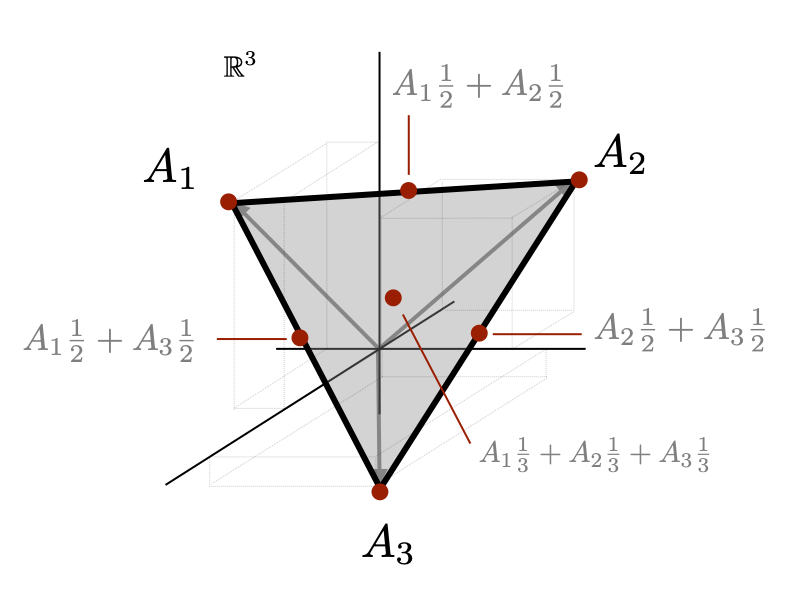
One specific type of linear combination that often arises is a convex combination. A convex combination of vectors is formed when we require the coefficients of a linear combination to all be positive and sum to one, ie. $$ A_1 x_1 + A_2 x_2 + \cdots + A_n x_n, \qquad with \qquad \sum_i x_i = 1, \qquad x_i \geq 0 $$ Note that we also write this constraint in more compact notation as \( \mathbf{1}^Tx = 1, \ x \geq 0 \) or even more simply as \(x \in \Delta_n\) where \(\Delta_n \) is the \(n\)D simplex. Visually, a convex combination of vectors live in the space between the vectors or the convex hull. For any two vectors \(A_1\) and \(A_2\), \(A_1 \tfrac{1}{2} + A_2 \tfrac{1}{2}\) is the vector halfway between the two vectors; for \(n\) vectors \(\sum_i A_i \tfrac{1}{n}\) is the center of the set of vectors ("average" vector of the set); etc. Different convex combinations of vectors \(\big\{A_1,A_2,A_3\big\} \in \mathbb{R}^3\) are illustrated in the figures below.
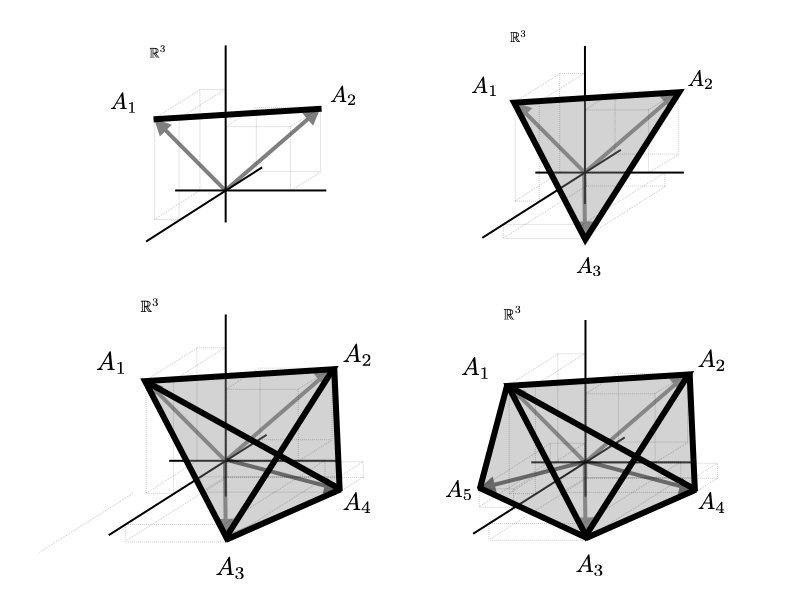
We can also show convex combinations of two, three, four, and five vectors.
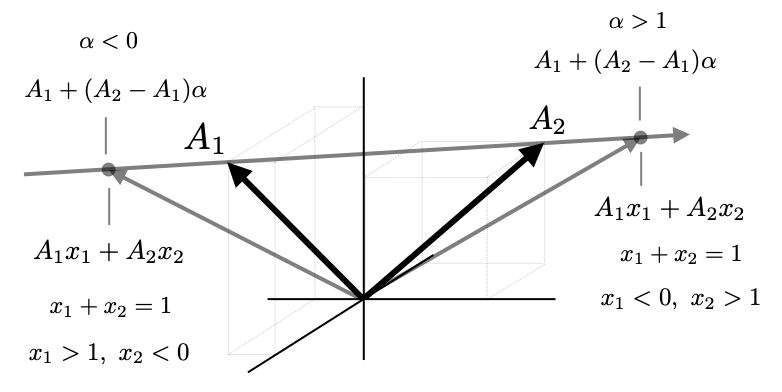
A convex combination between just two vectors is often written in the form $$ y = A_1 (1-\alpha) + A_2\alpha $$ with \(0 \leq \alpha \leq 1 \). We notice that if we start out with \(\alpha = 0\), \(y=A_1\). We note that we can rearrange the above expression to show explicitly how \(y\) changes with \(\alpha\) $$ y = A_1 + (A_2-A_1)\alpha $$ As \alpha moves from 0 to 1, \(y\) starts at \(A_1\) and then adds back little bits of the difference from \(A_1\) to \(A_2\) until \(y\) reaches \(A_2\). This perspective is illustrated in the figure below.
Keeping \(\alpha\) between 0 and 1 keeps \(y\) on the segment between \(A_1\) and \(A_2\). If we relax this condition and allow \(\alpha\) to be negative or greater than 1, we trace out a whole line that runs through \(A_1\) and \(A_2\). \(\alpha<0 \) extends past \(A_1\); \(\alpha > 1\) extends off past \(A_2\). Note that here \(x_1 = (1-\alpha)\) and \(x_2 = \alpha\). Removing the restriction on \(\alpha\) is equivalent to removing the restriction that \(x_1 \geq 0\) and \(x_2 \geq 0\). By construction, we still have \(x_1 + x_2 = (1-\alpha) + \alpha = 1 \)
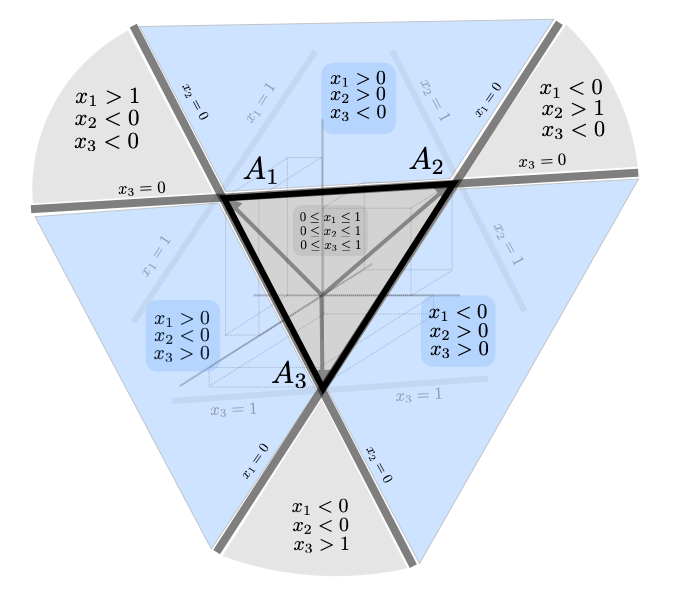
Note that this extension to the line through \(A_1\) and \(A_2\) applies to larger numbers of vectors as well. For example for three vectors \(\big\{A_1,A_2,A_3 \big\}\), removing the restriction that \(x\geq 0 \) expands the convex set to the plane shown below. Note the signs of \(x_1\),\(x_2\), and \(x_3\) in each part of the plane.
The above construction can be quite useful for determining quickly if a point is inside a triangle, tetrahedron, or hyper-tetrahedron. (This has many applications. For example it is a critical step in the implementation of the quickhull algorithm for computing convex hulls of points.) We focus on the case of three points in 2D, ie. determining if a point is inside a triangle.
To determine if a point \(y \in \mathbb{R}^2\) is inside a triangle formed by points \(\big\{A_1,A_2,A_3\big\} \subset \mathbb{R}^2\), we can form the following system of equations $$ \begin{bmatrix} y \\ 1 \end{bmatrix} = \underbrace{ \begin{bmatrix} \begin{matrix} | & | & | \\ A_1 & A_2 & A_3 \\ | & | & | \\ \end{matrix} \\ \begin{matrix} - & \mathbf{1}^T & - \end{matrix} \end{bmatrix} }_{M} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \underbrace{ \begin{bmatrix} A_{11} & A_{12} & A_{13} \\ A_{21} & A_{22} & A_{23} \\ 1 & 1 & 1 \end{bmatrix} }_{M} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} $$ The last row this system of equations requires \(x\) to sum to 1, ie. \(x\) generates linear combinations in the plane shown in the figure above. The first two rows then say that \(y\) is a linear combination of the \(A_i\) vectors. Note assuming this system is invertible, we can compute \(x=M^{-1}y\). After computing \(x\) one can immediately read off which section of the plane \(y\) is in based on the signs of the elements of \(x\). If \(x\geq 0\), then \(y\) is in the triangle. For fast implementation a \(3\times 3\) matrix \(M\) can be inverted explicitly (see inverse formulas).
Note: this system will always be invertible unless the triangle shown above collapse to a line and the problem is ill-posed. One could still actually take the pseudo-inverse which would determine if the projection of \(y\) onto that line was inside the convex combination of the points. (I think.)
For tetrahedrons or hyper-tetrahedrons in \(n\)D, this formula extends to checking if \(y \in \mathbb{R}^n\) is a convex combination of \(n+1\) points \(\big\{A_1,\dots,A_{n+1}\big\}\). The equation then becomes $$ \begin{bmatrix} y \\ 1 \end{bmatrix} = \underbrace{ \begin{bmatrix} \begin{matrix} | & & | \\ A_1 & \cdots & A_{n+1}\\ | & & | \\ \end{matrix} \\ \begin{matrix} - & \mathbf{1}^T & - \end{matrix} \end{bmatrix} }_{M} \begin{bmatrix} x_1 \\ \vdots \\ x_{n+1} \end{bmatrix} $$
Taking \(x = M^{-1}y\), one can similarly check that \(x\geq 0\).When we're working with a convex hull of a set of points, we may often want to write different coordinate systems based on those points. We list several useful coordinate transformations below along with explicit representations of their inverses, diagrams, and intuitive explanations. Of course, other useful transformations are possible. We write the formulas for points in \(\mathbb{R}^n\), but we draw figures for points in \(\mathbb{R}^3\) and \(\mathbb{R}^4\). The convex hull for 3 points in \(\mathbb{R}^3\) is a triangle; for 4 points in \(\mathbb{R}^4\) the convex hull is a 3D tetrahedron which can visualized. The first \(n-1\) coordinates in our tranformations will line up explicitly with each convex hull. The last coordinate will be related to the vector \(\mathbf{1}\).